Control
Research on control focuses on developing innovative algorithms for flight control and autonomous systems, emphasizing both theoretical advancements and practical breakthroughs. This field aims to enhance system performance, reliability, and adaptability in complex operational environments. Typical approaches include, but not limited to, nonlinear control, adaptive control, and data-driven control.
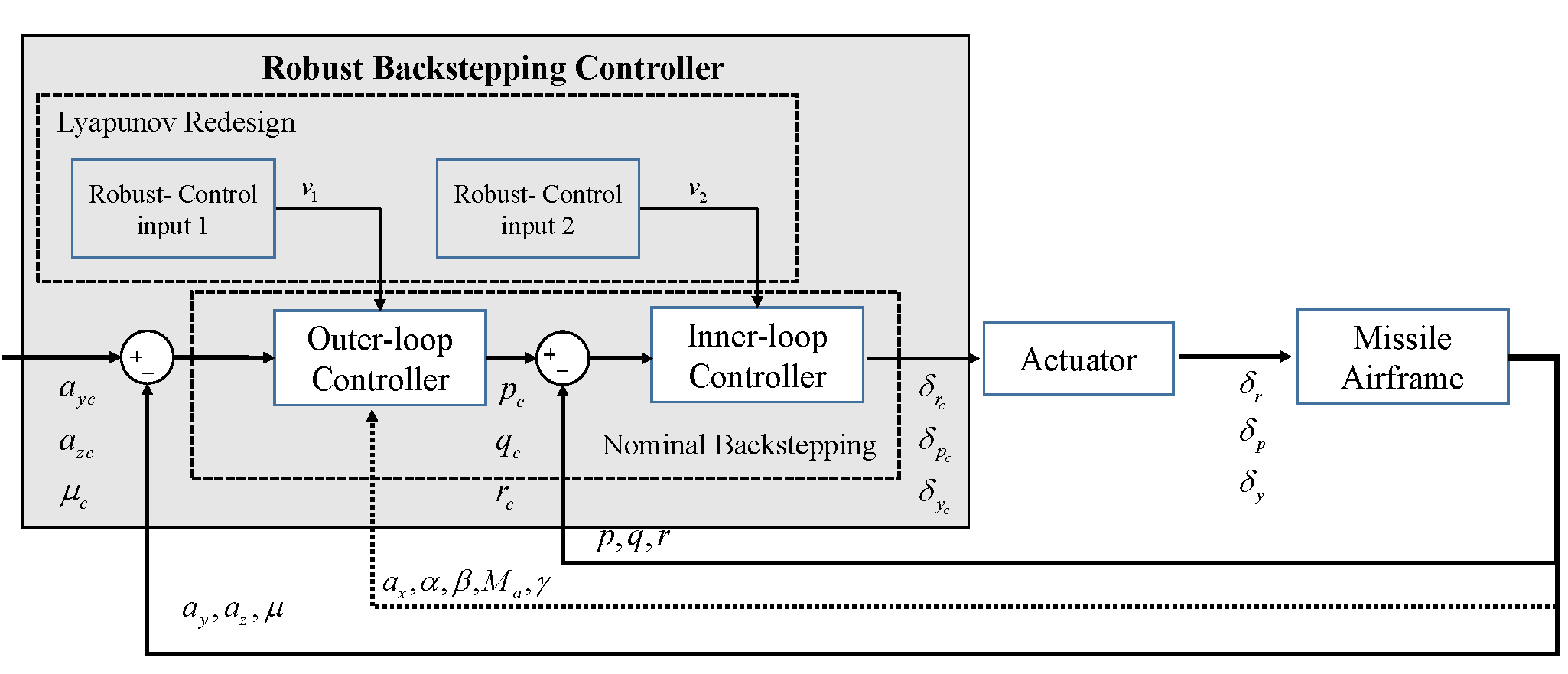
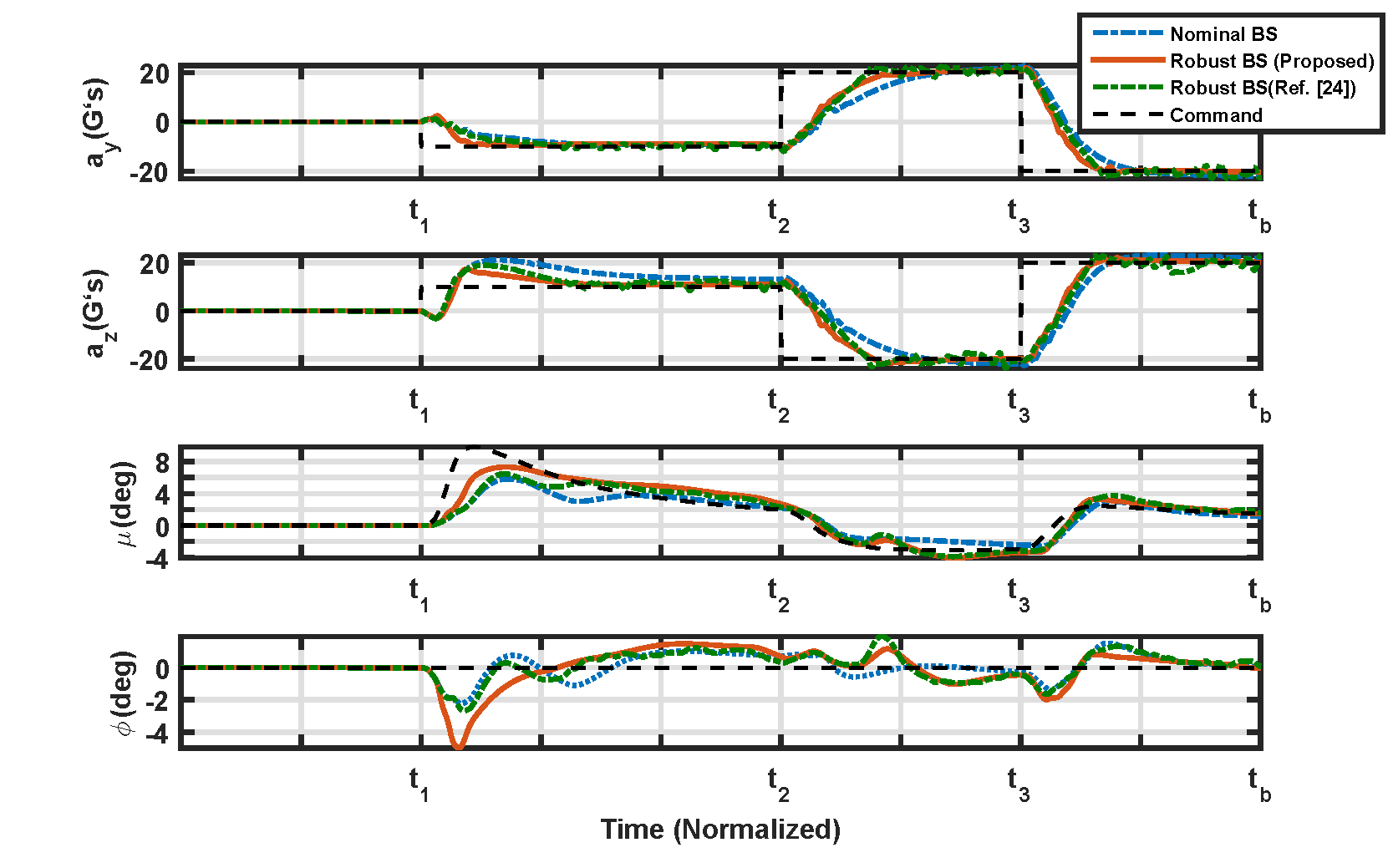
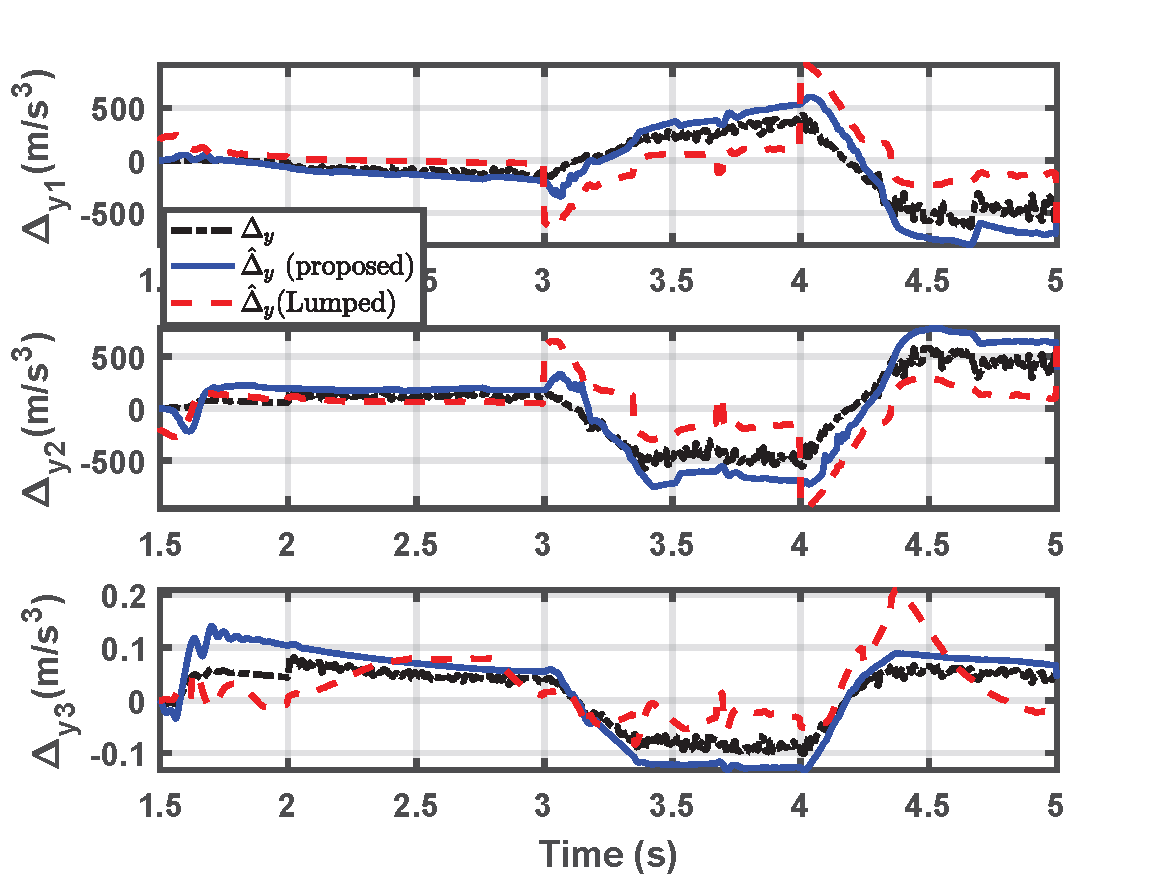
3-1. Nonlinear Missile Autopilots
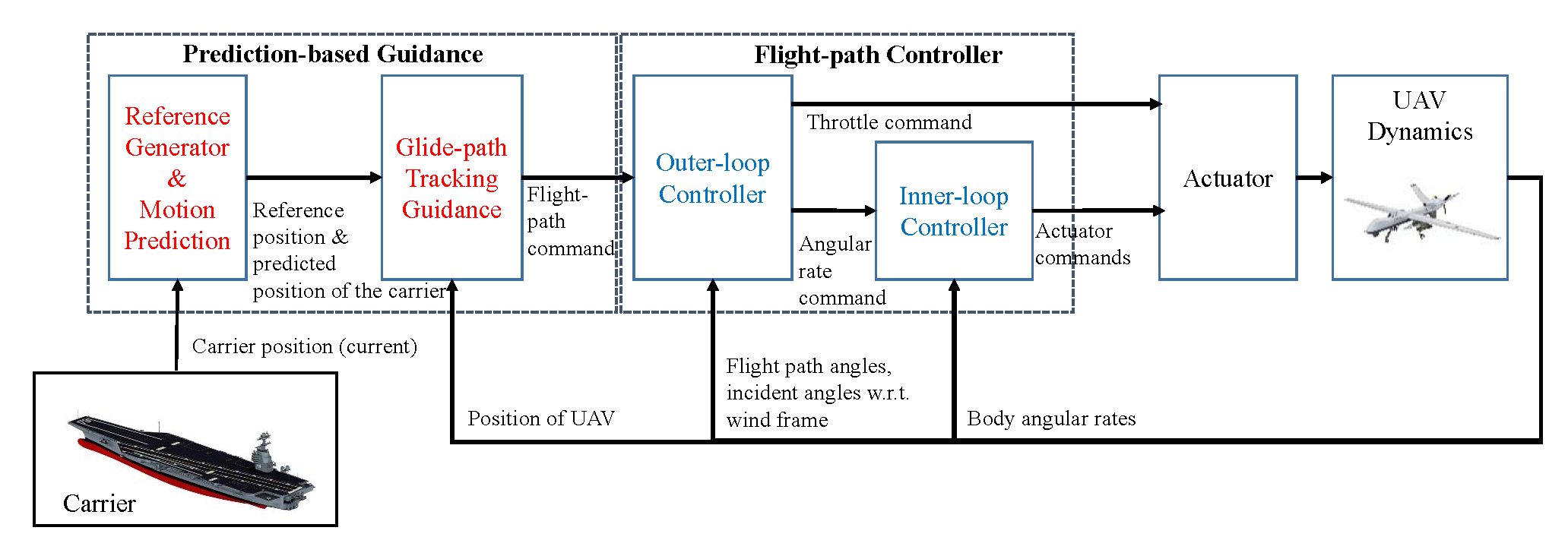
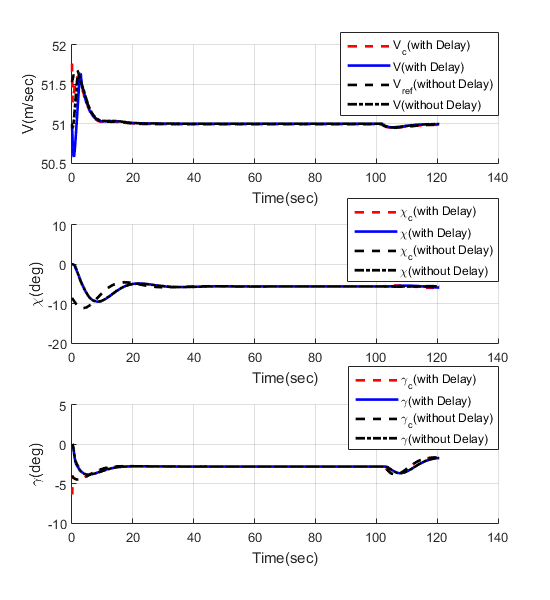
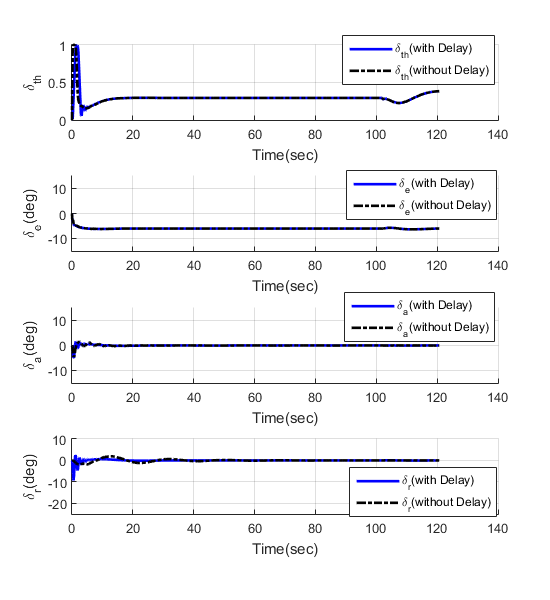
3-2. Fixed-Wing UAV Flight Controller
3-3. Attitude Control/ Stability-Augmentation System(SAS)
Wheeled Bipedal Robot (WBR) using EKF and LQR control
- Velocity, Yaw rate, Balancing controlled with LQR
- Extended Kalman Filter and CoM calculator applied for state estimation